
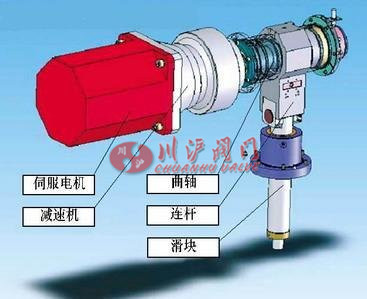
電動(dòng)執(zhí)行器-伺服電機(jī)的原理及應(yīng)用
伺服電動(dòng)機(jī)又稱執(zhí)行電動(dòng)機(jī),在自動(dòng)控制系統(tǒng)中,用作執(zhí)行元件,把所收到的電信號(hào),轉(zhuǎn)換成電動(dòng)機(jī)軸上的角位移或角速度輸出。分為直流和交流伺服電動(dòng)機(jī)兩大類,其主要特點(diǎn)是:當(dāng)信號(hào)電壓為零時(shí)無(wú)自轉(zhuǎn)現(xiàn)象,轉(zhuǎn)速隨著轉(zhuǎn)矩的增加而勻速下降。
一、伺服電機(jī)是一個(gè)典型閉環(huán)反饋系統(tǒng)
減速齒輪組由電機(jī)驅(qū)動(dòng),其終端(輸出端)帶動(dòng)一個(gè)線性的比例電位器作位置檢測(cè),該電位器把轉(zhuǎn)角坐標(biāo)轉(zhuǎn)換為一比例電壓反饋給控制線路板,控制線路板將其與輸入的控制脈沖信號(hào)比較,產(chǎn)生糾正脈沖,并驅(qū)動(dòng)電機(jī)正向或反向地轉(zhuǎn)動(dòng),使齒輪組的輸出位置與期望值相符,令糾正脈沖趨于為0,從而達(dá)到使伺服電機(jī)精確定位的目的。
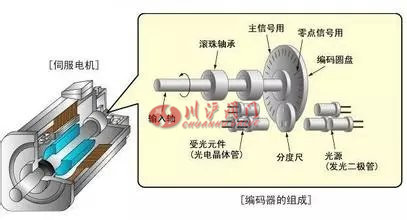
伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動(dòng)器控制的U/V/W三相電形成電磁場(chǎng),轉(zhuǎn)子在此磁場(chǎng)的作用下轉(zhuǎn)動(dòng),同時(shí)電機(jī)自帶的編碼器反饋信號(hào)給驅(qū)動(dòng)器,驅(qū)動(dòng)器根據(jù)反饋值與目標(biāo)值進(jìn)行比較,調(diào)整轉(zhuǎn)子轉(zhuǎn)動(dòng)的角度。伺服電機(jī)的精度決定于編碼器的精度(分辨率)。
1、 直流伺服電機(jī):
輸入或輸出為直流電能的旋轉(zhuǎn)電機(jī)。它的模擬調(diào)速系統(tǒng)一般是由2個(gè)閉環(huán)構(gòu)成的,既速度閉環(huán)和電流閉環(huán),為使二者能夠相互協(xié)調(diào)、發(fā)揮作用,在系統(tǒng)中設(shè)置了2個(gè)調(diào)節(jié)器,分別調(diào)節(jié)轉(zhuǎn)速和電流。2個(gè)反饋閉環(huán)在結(jié)構(gòu)上采用一環(huán)套一環(huán)的嵌套結(jié)構(gòu),這就是所謂的雙閉環(huán)調(diào)速系統(tǒng),它具有動(dòng)態(tài)響應(yīng)快、抗干擾能力強(qiáng)等優(yōu)點(diǎn),因而得到廣泛地應(yīng)用。
直流伺服電機(jī)可應(yīng)用在火花機(jī),機(jī)器手,精確的機(jī)器等,同時(shí)可加配減速箱,令機(jī)器設(shè)備帶來(lái)可靠的準(zhǔn)確性及高扭力。
2、交流伺服電機(jī):
輸入或輸出為交流電能的旋轉(zhuǎn)電機(jī)。?交流伺服電機(jī)分為同步和異步電機(jī)。
同步電機(jī)的主要運(yùn)行方式有三種,即作為發(fā)電機(jī)、電動(dòng)機(jī)和補(bǔ)償機(jī)運(yùn)行。作為發(fā)電機(jī)運(yùn)行是同步電機(jī)主要的運(yùn)行方式,作為電動(dòng)機(jī)運(yùn)行是同步電機(jī)的另一種重要的運(yùn)行方式。同步電動(dòng)機(jī)的功率因數(shù)可以調(diào)節(jié),在不要求調(diào)速的場(chǎng)合,應(yīng)用大型同步電動(dòng)機(jī)可以提高運(yùn)行效率。
異步電機(jī)負(fù)載時(shí)的轉(zhuǎn)速與所接電網(wǎng)的頻率之比不是恒定關(guān)系。異步電機(jī)有較高的運(yùn)行效率和較好的工作特性,從空載到滿載范圍內(nèi)接近恒速運(yùn)行,能滿足大多數(shù)工農(nóng)業(yè)生產(chǎn)機(jī)械的傳動(dòng)要求。缺點(diǎn)是異步電機(jī)運(yùn)行時(shí),必須從電網(wǎng)吸取無(wú)功勵(lì)磁功率,使電網(wǎng)的功率因數(shù)變壞。
因此,對(duì)驅(qū)動(dòng)球磨機(jī)、壓縮機(jī)等大功率、低轉(zhuǎn)速的機(jī)械設(shè)備,常采用同步電機(jī)。由于異步電機(jī)的轉(zhuǎn)速與其旋轉(zhuǎn)磁場(chǎng)轉(zhuǎn)速有一定的轉(zhuǎn)差關(guān)系,其調(diào)速性能較差(交流換向器電動(dòng)機(jī)除外),適用于驅(qū)動(dòng)無(wú)特殊性能要求的各種機(jī)械設(shè)備。對(duì)要求較寬廣和平滑調(diào)速范圍的交通運(yùn)輸機(jī)械、軋機(jī)、大型機(jī)床、印染及造紙機(jī)械等,采用直流電機(jī)較經(jīng)濟(jì)、方便。

二、交流伺服系統(tǒng)已成為當(dāng)代高性能伺服系統(tǒng)的主要發(fā)展方向
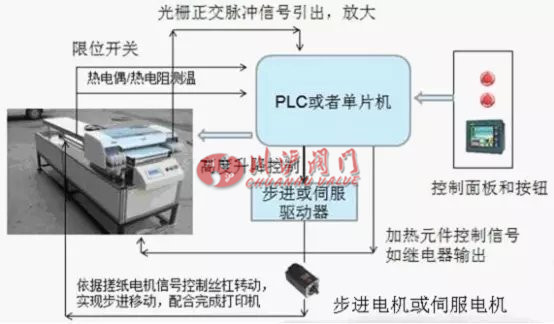
運(yùn)動(dòng)控制系統(tǒng)中大多采用全數(shù)字式交流伺服電機(jī)作為執(zhí)行電動(dòng)機(jī)。在控制方式上用脈沖串和方向信號(hào)實(shí)現(xiàn)。
一般伺服都有三種控制方式:速度控制方式、轉(zhuǎn)矩控制方式、位置控制方式 。
速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制的。位置控制是通過(guò)發(fā)脈沖來(lái)控制的。?
如果控制器本身的運(yùn)算速度很慢(比如PLC,或低端運(yùn)動(dòng)控制器),就用位置方式控制。如果控制器運(yùn)算速度比較快,可以用速度方式,把位置環(huán)從驅(qū)動(dòng)器移到控制器上,減少驅(qū)動(dòng)器的工作量,提高效率(比如大部分中高端運(yùn)動(dòng)控制器)。

1、轉(zhuǎn)矩控制:
轉(zhuǎn)矩控制方式,是通過(guò)外部模擬量的輸入或直接的地址的賦值,來(lái)設(shè)定電機(jī)軸對(duì)外的輸出轉(zhuǎn)矩的大小,具體表現(xiàn)為例如:10V對(duì)應(yīng)5Nm的話,當(dāng)外部模擬量設(shè)定為5V時(shí)電機(jī)軸輸出為2.5Nm:如果電機(jī)軸負(fù)載低于2.5Nm時(shí)電機(jī)正轉(zhuǎn),外部負(fù)載等于2.5Nm時(shí)電機(jī)不轉(zhuǎn),大于2.5Nm時(shí)電機(jī)反轉(zhuǎn)(通常在有重力負(fù)載情況下產(chǎn)生)。可以通過(guò)即時(shí)的改變模擬量的設(shè)定來(lái)改變?cè)O(shè)定的力矩大小,也可通過(guò)通訊方式改變對(duì)應(yīng)的地址的數(shù)值來(lái)實(shí)現(xiàn)。應(yīng)用主要在對(duì)材質(zhì)的受力有嚴(yán)格要求的纏繞和放卷的裝置中,例如饒線裝置或拉光纖設(shè)備,轉(zhuǎn)矩的設(shè)定要根據(jù)纏繞的半徑的變化隨時(shí)更改以確保材質(zhì)的受力不會(huì)隨著纏繞半徑的變化而改變。
2、位置控制:
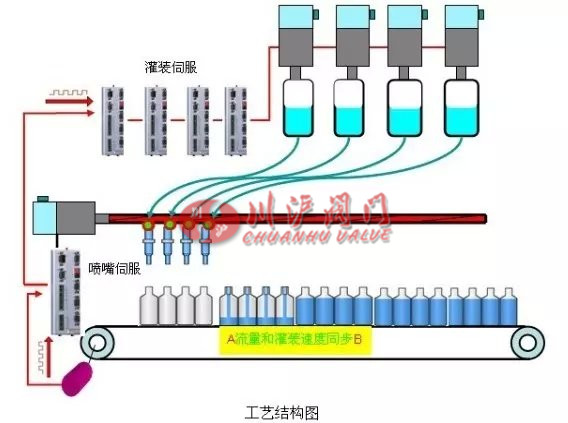
位置控制模式,一般是通過(guò)外部輸入的脈沖的頻率,來(lái)確定轉(zhuǎn)動(dòng)速度的大小,通過(guò)脈沖的個(gè)數(shù)來(lái)確定轉(zhuǎn)動(dòng)的角度,也有些伺服可以通過(guò)通訊方式直接對(duì)速度和位移進(jìn)行賦值。由于位置模式可以對(duì)速度和位置都有很?chē)?yán)格的控制,所以一般應(yīng)用于定位裝置。應(yīng)用領(lǐng)域如數(shù)控機(jī)床、印刷機(jī)械等等。
3、速度模式:
通過(guò)模擬量的輸入或脈沖的頻率,都可以進(jìn)行轉(zhuǎn)動(dòng)速度的控制,在有上位控制裝置的外環(huán)PID控制時(shí)速度模式也可以進(jìn)行定位,但必須把電機(jī)的位置信號(hào)或直接負(fù)載的位置信號(hào)給上位反饋以做運(yùn)算用。位置模式也支持直接負(fù)載外環(huán)檢測(cè)位置信號(hào),此時(shí)的電機(jī)軸端的編碼器只檢測(cè)電機(jī)轉(zhuǎn)速,位置信號(hào)就由直接的終負(fù)載端的檢測(cè)裝置來(lái)提供了,這樣的優(yōu)點(diǎn)在于可以減少中間傳動(dòng)過(guò)程中的誤差,增加了整個(gè)系統(tǒng)的定位精度。
三、伺服與變頻
伺服的基本概念是準(zhǔn)確、精確、快速定位。變頻是伺服控制的一個(gè)必須的內(nèi)部環(huán)節(jié),伺服驅(qū)動(dòng)器中同樣存在變頻(要進(jìn)行無(wú)級(jí)調(diào)速)。但伺服將電流環(huán)速度環(huán)或者位置環(huán)都閉合進(jìn)行控制,這是很大的區(qū)別。
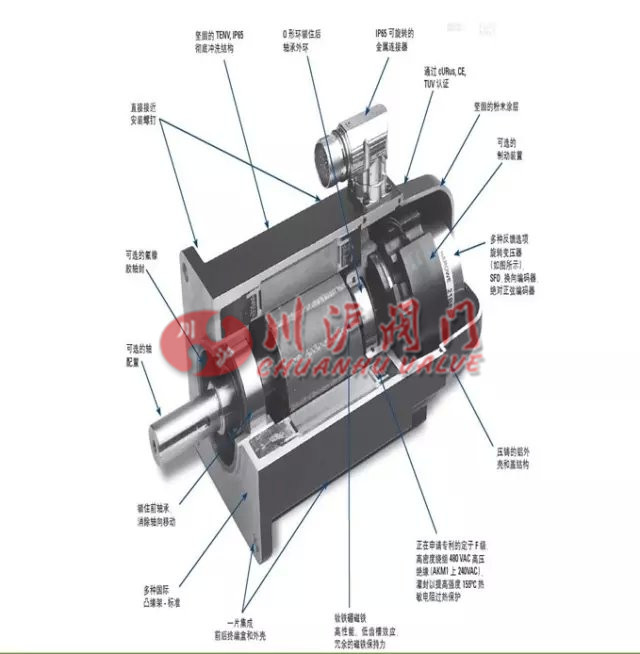
除此外,伺服電機(jī)的構(gòu)造與普通電機(jī)是有區(qū)別的,要滿足快速響應(yīng)和準(zhǔn)確定位。現(xiàn)在市面上流通的交流伺服電機(jī)多為永磁同步交流伺服,但這種電機(jī)受工藝限制,很難做到很大的功率,十幾KW以上的同步伺服價(jià)格及其昂貴,這樣在現(xiàn)場(chǎng)應(yīng)用允許的情況下多采用交流異步伺服,這時(shí)很多驅(qū)動(dòng)器就是高端變頻器,帶編碼器反饋閉環(huán)控制。所謂伺服就是要滿足準(zhǔn)確、精確、快速定位,只要滿足就不存在伺服變頻之爭(zhēng)。?
1、兩者的共同點(diǎn):?
交流伺服的技術(shù)本身就是借鑒并應(yīng)用了變頻的技術(shù),在直流電機(jī)的伺服控制的基礎(chǔ)上通過(guò)變頻的PWM方式模仿直流電機(jī)的控制方式來(lái)實(shí)現(xiàn)的,也就是說(shuō)交流伺服電機(jī)必然有變頻的這一環(huán)節(jié):變頻就是將工頻的50、60HZ的交流電先整流成直流電,然后通過(guò)可控制門(mén)極的各類晶體管(IGBT,IGCT等)通過(guò)載波頻率和PWM調(diào)節(jié)逆變?yōu)轭l率可調(diào)的波形類似于正余弦的脈動(dòng)電,由于頻率可調(diào),所以交流電機(jī)的速度就可調(diào)了(n=60f/p ,n轉(zhuǎn)速,f頻率, p極對(duì)數(shù))?
2、談?wù)勛冾l器:?
簡(jiǎn)單的變頻器只能調(diào)節(jié)交流電機(jī)的速度,這時(shí)可以開(kāi)環(huán)也可以閉環(huán)要視控制方式和變頻器而定,這就是傳統(tǒng)意義上的V/F控制方式。
現(xiàn)在很多的變頻已經(jīng)通過(guò)數(shù)學(xué)模型的建立,將交流電機(jī)的定子磁場(chǎng)UVW3相,轉(zhuǎn)化為可以控制電機(jī)轉(zhuǎn)速和轉(zhuǎn)矩的兩個(gè)電流的分量,UVW每相的輸出要加霍爾效應(yīng)的電流檢測(cè)裝置,采樣反饋后構(gòu)成閉環(huán)負(fù)反饋的電流環(huán)的PID調(diào)節(jié)。這樣可以既控制電機(jī)的速度也可控制電機(jī)的力矩,而且速度的控制精度優(yōu)于v/f控制,編碼器反饋也可加可不加,加的時(shí)候控制精度和響應(yīng)特性要好很多。
四、談?wù)勊欧?/h2>
驅(qū)動(dòng)器方面:伺服驅(qū)動(dòng)器在發(fā)展了變頻技術(shù)的前提下,在驅(qū)動(dòng)器內(nèi)部的電流環(huán),速度環(huán)和位置環(huán)(變頻器沒(méi)有該環(huán))都進(jìn)行了比一般變頻更精確的控制技術(shù)和算法運(yùn)算,在功能上也比傳統(tǒng)的變頻強(qiáng)大很多,主要的一點(diǎn)可以進(jìn)行精確的位置控制。通過(guò)上位控制器發(fā)送的脈沖序列來(lái)控制速度和位置(當(dāng)然也有些伺服內(nèi)部集成了控制單元或通過(guò)總線通訊的方式直接將位置和速度等參數(shù)設(shè)定在驅(qū)動(dòng)器里),驅(qū)動(dòng)器內(nèi)部的算法和更快更精確的計(jì)算以及性能更優(yōu)良的電子器件使之更優(yōu)越于變頻器。
五、電機(jī)方面:
伺服電機(jī)的材料、結(jié)構(gòu)和加工工藝要遠(yuǎn)遠(yuǎn)高于變頻器驅(qū)動(dòng)的交流電機(jī)(一般交流電機(jī)或恒力矩、恒功率等各類變頻電機(jī)),也就是說(shuō)當(dāng)驅(qū)動(dòng)器輸出電流、電壓、頻率變化很快的電源時(shí),伺服電機(jī)就能根據(jù)電源變化產(chǎn)生響應(yīng)的動(dòng)作變化,響應(yīng)特性和抗過(guò)載能力遠(yuǎn)遠(yuǎn)高于變頻器驅(qū)動(dòng)的交流電機(jī),電機(jī)方面的嚴(yán)重差異也是兩者性能不同的根本。就是說(shuō)不是變頻器輸出不了變化那么快的電源信號(hào),而是電機(jī)本身就反應(yīng)不了,所以在變頻的內(nèi)部算法設(shè)定時(shí)為了保護(hù)電機(jī)做了相應(yīng)的過(guò)載設(shè)定。當(dāng)然即使不設(shè)定變頻器的輸出能力還是有限的,有些性能優(yōu)良的變頻器就可以直接驅(qū)動(dòng)伺服電機(jī)。
六、應(yīng)用?
由于變頻器和伺服在性能和功能上的不同,所以應(yīng)用也不大相同:?
1、在速度控制和力矩控制的場(chǎng)合要求不是很高的一般用變頻器,也有在上位加位置反饋信號(hào)構(gòu)成閉環(huán)用變頻進(jìn)行位置控 ? ? ? 制的,精度和響應(yīng)都不高。?
2、在有嚴(yán)格位置控制要求的場(chǎng)合中只能用伺服來(lái)實(shí)現(xiàn),還有就是伺服的響應(yīng)速度遠(yuǎn)遠(yuǎn)大于變頻,有些對(duì)度的精度和響應(yīng) ? ? ? ?要求高的場(chǎng)合也用伺服控制,能用變頻控制的運(yùn)動(dòng)的場(chǎng)合幾乎都能用伺服取代,關(guān)鍵是兩點(diǎn):一是價(jià)格伺服遠(yuǎn)遠(yuǎn)高于 ? ? ? 變頻,二是功率的原因:變頻大的能做到幾百KW,甚至更高,而伺服大就幾十KW。

上海川滬閥門(mén)生產(chǎn)的直行程電動(dòng)執(zhí)行器和角行程電動(dòng)執(zhí)行器都有伺服電機(jī),可配置用于電動(dòng)調(diào)節(jié)閥和電動(dòng)球閥、電動(dòng)蝶閥等閥門(mén)上使用,上海川滬閥門(mén)生產(chǎn)的電動(dòng)執(zhí)行器廣泛用于冶金、水處理、環(huán)保、化工等行業(yè)上,得到了廣大客戶的一致好評(píng)。咨詢電話:021-51863046

直行程電動(dòng)執(zhí)行器

角行程電動(dòng)執(zhí)行器
- · 電動(dòng)調(diào)節(jié)閥
- · 氣動(dòng)調(diào)節(jié)閥
- · 電動(dòng)球閥
- · 氣動(dòng)球閥
- · 電動(dòng)蝶閥
- · 氣動(dòng)蝶閥
- · 自力式調(diào)節(jié)閥
- · 川滬控制系統(tǒng)
- · 電磁閥
- · 切斷閥
- · 電動(dòng)閘閥
- · 氣動(dòng)閘閥
- · 電動(dòng)截止閥
- · 氣動(dòng)截止閥
- · 電動(dòng)執(zhí)行器
- · 氣動(dòng)執(zhí)行器
- · 球閥
- · 蝶閥
- · 截止閥
- · 過(guò)濾器
- · 止回閥
- · 減壓閥
- · 安全閥
- · 放料閥
- · 保溫閥
- · 呼吸閥
- · 冶金閥門(mén)
- · 水利控制閥

